دستگاه پرتابل هوشمند پایش وضعیت گیربکس
مقدمه
دانش تحلیل نویز، ارتعاشات ((1)NVH) در صنعت خودرو شاخهای از علم است که به بررسی ارتعاشات و صداهای ایجاد شده توسط خودروها پرداخته و برای تلفیق اثرات این دو پارامتر، مشخصه جدیدی به نام هارشنس(2) را معرفی میکند که مجموع اثرات منفی ارتعاشات و صداهای خودرو بر انسان را در خود جای میدهد.
بررسی وضعیت کارکرد ماشین(3)، نیازمند استفاده از انواع سنسورها برای شناسایی رفتار آن است. انسان قادر به درک جامع و دقیق از رفتار سیستم با استفاده از دادههای خام دریافتی از سنسورها نیست، درنتیجه نیازمند پردازش و استخراج اطلاعات مفید جهت درک رفتار ماشین است. از طرف دیگر با توجه به محدودیت انسان جهت درک همزمان تمام پارامترها، نیازمند استفاده از کامپیوتر جهت پردازش همزمان چندین اطلاعات دریافتی از سنسورها هستیم. همچنین امکان بروز خطای انسانی در تجزیهوتحلیل دادهها و تشخیص اشتباه و یا دیر هنگام از رفتار ماشین موردنظر، میتواند باعث تشدید خرابی در ماشین شده که در کارکرد بیشتر آن، رشد خرابی را به همراه داشته و خسارات اقتصادی قابل توجهی ایجاد خواهد کرد و یا ممکن است ماشین تحویلی به مشتری با عدم رضایت از محصول روبرو شود. درنتیجه، برای شناسایی دقیق رفتار ماشینها نیازمند استفاده از ابزار کمکی است تا بتوان خطا در تشخیص رفتار سیستم را به حداقل رساند. یکی از این ابزار، استفاده از هوش مصنوعی و یا شبکههای عصبی مصنوعی(4) است که میتوان همزمان اطلاعاتی که از سنسورها دریافت و پردازش کرده و رفتار سیستم را بهخوبی شناسایی کند.
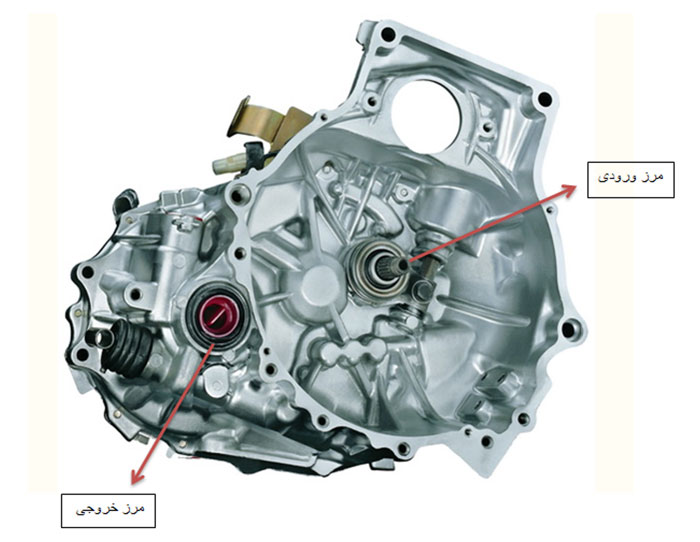
یکی از اصلیترین بخشهای انتقال قدرت در خودرو، گیربکس است. با توجه به اهمیت این سیستم، در کارخانههای ساخت گیربکس، در انتهای خط تولید بخشی به نام کنترل کیفیت پایان خط (EOL(5)) وجود دارد که تمام گیربکسهای تولید شده، مورد آزمون قرار میگیرند تا در صورت وجود ایراد عملکردی، شناسایی صورت پذیرد و به بخش تعمیرات ارجاع داده شود. در این بخش ممکن است عواملی نظیر عدم دقت کافی، خستگی و یا تشخیص اشتباه اپراتور مربوطه، باعث بروز خطا در شناسایی رفتار گیربکس شده، درنتیجه گیربکس خراب و سالم اشتباه تشخیص داده شوند. برای از بین بردن احتمال بروز خطا و نیز حفظ تجربه و افزایش راندمان و سرعت عمل، میتوان از هوش مصنوعی جهت تشخیص عیب گیربکس استفاده کرد. در این حالت با استفاده از دادههای ثبت شده توسط سنسورها و پردازش آنها، هوش مصنوعی آموزش داده شده و شناسایی رفتار گیربکس به صورت جامع و دقیق انجام خواهد گرفت. نکته قابل ذکر این است که، در نمونههای خارجی برای تشخیص عیوب گیربکس، از چندین سنسور و میکروفون استفاده شده است، اما در این پروژه از دو سنسور شتاب سنج جهت تشخیص عیوب گیربکس استفاده میشود. بعد از دریافت و ذخیره سازی دادهها از سنسور شتاب سنج، دادهها به بخش پردازش سیگنال منتقل شده و آماده میشوند تا به شبکه عصبی معرفی شوند. درنهایت با استفاده از آموزش شبکه عصبی، میتوان عیوب را بهخوبی تشخیص داد.
ابزار دادهبرداری
سنسورهای مورد استفاده برای عیبیابی هوشمند گیربکس، عموماً شامل میکروفون، لیزر داپلر، شتابسنج و تاکومتر (دورسنج) است. در پروژه اجرا شده، از سنسور شتابسنج و تاکومتر به منظور تشخیص عیوب استفاده میشود و تجهیزات دادهبرداری به منظور تشخیص عیوب عبارت هستند از:
- سنسور شتاب سنج پیزوالکتریک
- تاکومتر
- کارت دادهبرداری NI 4431
- کامپیوتر
در شکل ۱ شماتیک کلی سیستم تشخیص عیوب هوشمند گیربکس را نشان داده شده که در آن با استفاده از آنالایزر طراحی شده، پردازش سیگنال، آموزش شبکه عصبی و تست گیربکس انجام میشود.
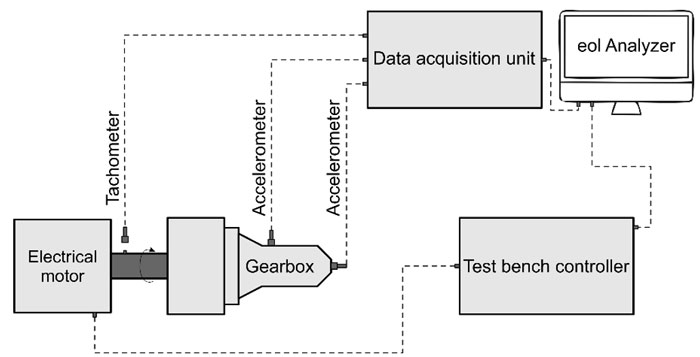
شکل 1 شماتیک تست عیبیابی هوشمند دستگاه EOL

شکل 2 کارت دادهبرداری و سنسورهای اندازهگیری
پردازش سیگنال
با توجه به عیوب متداول در گیربکس خودروها، روشهای متعددی برای تحلیل سیگنال وجود داشته که در این گزارش به برخی از آنها اشاره شده است.
- آنالیز طیف فرکانسی
- آنالیز موجک(6)
- آنالیز مرتبه(7)
- آنالیز سیگنال در حوزه زمان
- آنالیز زمان-فرکانس
- آنالیز انولوپ(8)
عیبیابی گیربکس نیازمند تعیین رفتار گیربکس در تمام حالات بوده، یعنی دادهبرداری در تمامی حالات عملکردی در دندههای مختلف گیربکس انجام شده و سیگنال موردنیاز جهت پردازشهای آتی و عیبیابی ثبت میشود. بدین منظور، سناریو انجام تست گیربکس به نحوی طراحی شده که در مدت زمان معین شامل کلیه حالات عملکردی باشد. به عنوان مثال، سناریوی عملکرد یک دنده از گیربکس در شکل ۳ مشاهده میشود.
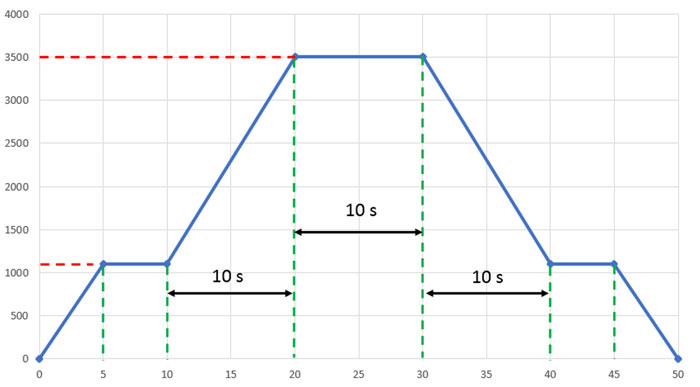
شکل 3 سناریو تعریف شده برای روند تغییرات دور موتور
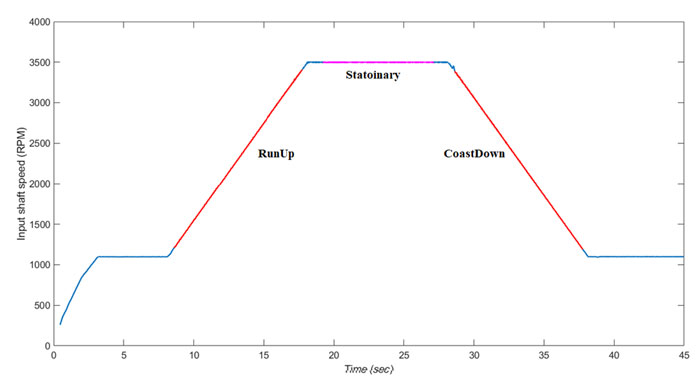
شکل 4 سناریو انجام شده توسط دستگاه
با توجه به شکل ۴، سیگنالهای مرتبط با بخش افزایش سرعت، سرعت ثابت و کاهش سرعت مشخص شده است. با توجه به متغیر بودن سرعت و محدودیت در استفاده از تحلیلهای حوزه فرکانس، آنالیز مرتبه که در زیرمجموعه تحلیلهای زمان-فرکانس قرار دارد، برای استخراج ویژگیهای سیگنال مناسب است. در شکل ۵ نمونهای از آنالیز مرتبه دنده سه در هنگام افزایش سرعت ارائه شده است. همانطور که پیشتر بیان شد، آنالیز مرتبه در مواردی استفاده میشود که سرعت متغیر بوده و سیگنال شتاب حاصل غیر پایا باشد. اصول کلی آنالیز مرتبه بیبعد کردن تمام فرکانسها نسبت به سرعت دورانی اندازهگیری شده است. بر اساس این تحلیل، مرتبه یک نشان دهنده دور ورودی یا همان فرکانس ورودی (سرعت اندازهگیری شده با تاکومتر) است. برای اینکه بتوان سیگنال را نسبت به دور ورودی بی بعد کرد، سیگنال حاصل از تاکومتر که دربردارنده سرعت ورودی است میبایست به صورت همزمان با سیگنال شتاب ذخیره شود.
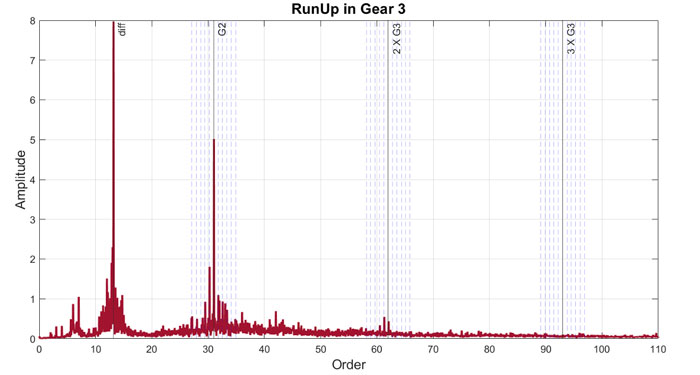
شکل 5 آنالیز مرتبه دنده 3 در حالت افزایش سرعت
در عیبیابی گیربکس با بتوان هر حالت از رفتار گیربکس را شناسایی کرد. بهعنوان مثال، حالت سالم گیربکس، خرابی نوع ۱، خرابی نوع ۲ و …. با توجه به اهمیت تشخیص عیوب و تأثیر انتخاب ویژگیها بر آن، مشخصههای استخراج شده باید توانایی تفکیک نمودن رفتار مختلف گیربکس وجود داشته باشد. بنابراین، ممکن است بعضی از ویژگیهای استخراج شده اهمیت بیشتری در تشخیص عیوب و رفتار گیربکس داشته باشند. درنتیجه با استفاده از روش امتیازدهی به ویژگیها (شکل ۶)، میتوان مؤثرترین آنها را به منظور تشخیص رفتار گیربکس استخراج کرد.
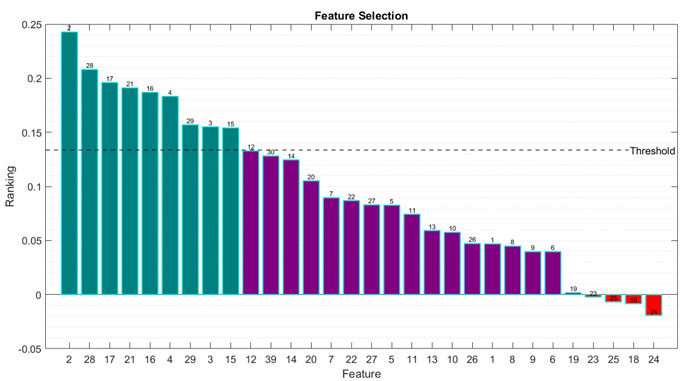
شکل 6 امتیاز دهی به ویژگیهای استخراج شده از سیگنال
شبکه عصبی مصنوعی
شبکه عصبی مصنوعی، حاصل شبیهسازی شبکه عصبی موجودات زنده است. عصب، متشکل از تعدادی نورون(9) بوده که باهم در ارتباط هستند که میزان قدرت این اتصال، آموزش شبکه عصبی را فراهم میکند. هر نورون در شبکه عصبی متشکل است هسته، ترمینال ورودی، ترمینال خروجی و آکسون(10) بوده که در شکل 6 مشاهده میشود. نورون مصنوعی بر اساس ساختار نورونهای طبیعی شبیهسازی شده است، یعنی شامل هسته مرکزی، ترمینال خروجی، ترمینال ورودی و فعال ساز (آکسون در نورون طبیعی) میباشد.
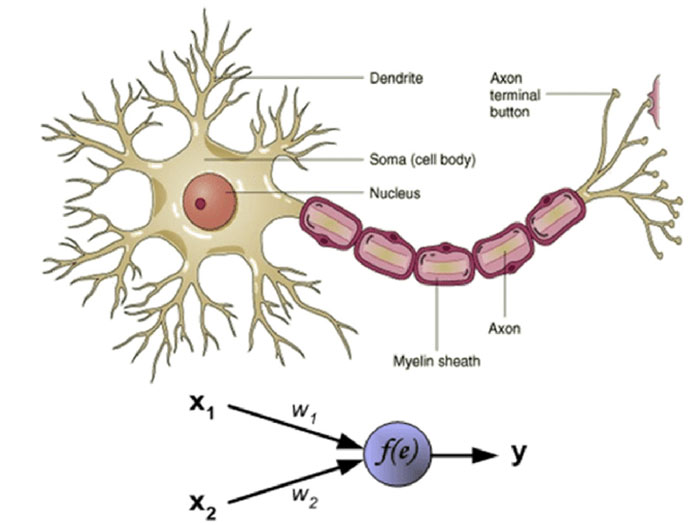
شکل 7 شبیهسازی نورون مصنوعی از نورون طبیعی
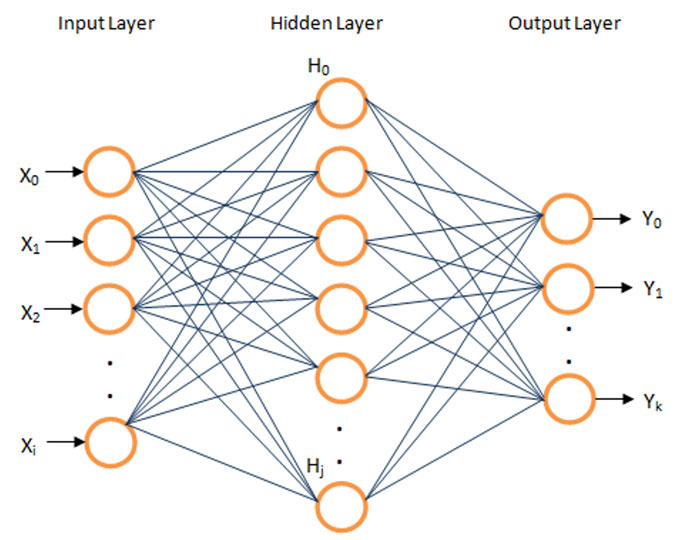
شبکه عصبی از تعداد زیادی نورون تشکیل شده و درنتیجه از اتصال تعدادی از نورونهای مصنوعی، میتوان شبکه عصبی مصنوعی را ایجاد کرد. با توجه به چیدمان نورونها و نوع تابع فعالساز، شبکههای عصبی مصنوعی متفاوتی توسعه داده شده که هرکدام برای کاربرد خاصی استفاده میشوند. ابتداییترین شبکه عصبی، شبکه عصبی چند لایه پرسپترون(11) است. معماری این شبکه متشکل از لایه ورودی، لایه پنهان و لایه خروجی است که بعد از هر لایهی پنهان یک تابع فعالساز(12) وجود دارد به این دلیل که اگر مقدار سیگنال، بیشتر از مقدار تعریف شده باشد، خروجی مورد نظر فعال شده و اگر کمتر از آن باشد، خروجی فعال نخواهد شد. همانطور که در شکل 8 ارائه شده است، تمام نورونها به هم متصل بوده و باهم ارتباط دارند که هر ارتباط دارای ضریب است، آموزش شبکه عصبی مصنوعی به معنی تعیین مقادیر این ضرایب بهطوری است که با ورودی مشخص، خروجی مطلوب حاصل شود.
از شبکه عصبی برای کاربردهای متنوعی استفاده میشود که میتوان با استفاده از دادههای مناسب، شبکه عصبی را آموزش داد و نتایج مطلوب و موردنیاز را بدست آورد. نمونهای از کاربردهای شبکه عصبی مصنوعی، استفاده از آن در پایش وضعیت ماشینآلات صنعتی است که در اینجا ماشین مورد نظر ما گیربکس میباشد.
در عیبیابی هوشمند گیربکس مبتنی بر شبکه عصبی مصنوعی، با استفاده از پردازش سیگنال، دادههای موردنیاز برای آموزش شبکه عصبی آماده شده است تا با توجه به خروجی متناظر با هر ورودی، شبکه عصبی بتواند تمام حالات تعریف شده در گیربکس را شناسایی کند. روند کلی به این صورت است که در ابتدا باید بانک اطلاعاتی موردنیاز برای آموزش شبکه عصبی فراهم شود. بنابراین، باید از تمام حالات موجود از گیربکس اعم از انواع خرابیها و حالت سالم گیربکس، دادهبرداری انجام شود. در گام بعد دادههای خام پردازش شده تا بتوان بهعنوان داده آموزشی به شبکه عصبی معرفی نمود. درواقع، ویژگیهای برتر و استخراج شده در بخش پردازش سیگنال، ورودی موردنیاز برای شبکه عصبی است تا بتواند عیبیابی را به نحو ایدهآل انجام دهد. بعد از آموزش شبکه عصبی با تعداد داده کافی، شبکه عصبی قادر خواهد بود که حالات اتفاق افتاده در گیربکس را شناسایی کند که در این مرحله پایش وضعیت هوشمند گیربکس با موفقیت انجام شده است.
معرفی محصول
وجود خرابی و عدم تشخیص به موقع در ماشین، میتواند باعث تشدید و رشد خرابی شده که ممکن است کارکرد ماشین با مشکل موجه شده و خط تولید در یک کارخانه متوقف شود و خسارات اقتصادی قابل توجهی ایجاد خواهد کرد. در نتیجه، با تشخیص به موقع و درست خرابی میتوان از خسارات انسانی و اقتصادی ناشی از خرابی ماشین جلوگیری کرد. به همین دلیل، محصولی معرفی شده است که دست آورد گروه NVH شرکت جتکو بوده که توانایی تشخیص به موقع و درست عیوب را با استفاده از هوش مصنوعی با دقت بالا انجام خواهد داد.
محصول مورد نظر در حالت کلی از دو بخش آنالایزر و سنسور تشکیل شده است که با توجه به کاربردهای خاص، از سنسورهای مختلف استفاده میشود. آنالایز شامل سخت افزار و نرم افزار میباشد. سخت افزار آنالایزر شامل کامپیوتر، کارت داده برداری و مانیتور است و نرم افزار آن که دستاورد اصلی ما بوده با استفاده از هوش مصنوعی و سیگنالهایی که از سنسورها دریافت میکند توانایی یادگیری رفتار و خرابی ماشین مورد نظر را دارد. همانطور که گفته شد، آنالایزر را میتوان در صنایع مختلفی از جمله، توربینهای بادی، توربینهای گازی، توربین بخار، کمپرسور، فن، انواع پمپها، الکتروموتورها، ژنراتور، موتور خوردو، انواع گیربکس، کانوایر، صنایع ریلی و ….. مورد استفاده قرار داد.
پانوشت
[1] Noise Vibration Harshness (NVH)
[2] Harshness
[3] Machine
[4] Artificial neural networks
[5] End of Line
[6] Wavelet analysis
[7] Order analysis
[8] Envelope analysis
[9] Neuron
[10] Axon
[11] Multilyer perceptron (MLP)
[12] Activation function

دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.