دینامیک در صنعت خودرو
مقدمه
ساختار صنعت و بازار جهانی خودرو، تغییر بیسابقهای را در دهه 1990 تجربه نمود. در سالهای اخیر، میل و تقاضا به سمت ایمنی خودرو، حفظ محیط زیست و کنترل هوشمند رو به افزایش بوده است. بنابراین، فناوریهای پیشرفته مانند فناوری رایانه، فناوری واقعیت مجازی (1) و الگوریتم هوشمند، به طور گستردهای در صنعت خودرو به کار برده شدهاند. دینامیک خودرو، به عنوان تئوری بنیادی صنعت خودرو شناخته میشود که نقش مهمی در توسعه صنعت خودرو دارد. در دهههای پیش، پیشرفت شگرفی در زمینه تئوری و تجربی دینامیک خودرو پدید آمده است.
در دینامیک خودرو، بدنه خودرو (جرم معلق(2))، اجزاء تعلیق (بخشی از آن جرم معلق و بخش دیگری از آن جرم غیر معلق (3)) و تایر (جرم معلق) اجزاء حیاتی این سیستم به شمار میروند. هر چند، سیستم انتقال قدرت (4)، ترمز و فرمان نیز از اجزاء جداییناپذیر این سیستم میباشند. روشهای مدلسازی و مشخصههای خودرو، تایر و مدل راننده خودرو (رفتار راننده)، با توجه به فرمانپذیری (5) و راحتی سواری (6)، در این مقاله مورد بحث قرار خواهند گرفت.
مشاهده فیلم وبینار «دینامیک خودرو؛ طراحی سیستمی و فناوریهای نوین»
در زمینه دینامیک خودرو، برای انجام امور طراحی، نرمافزارهای بسیاری موجود هستند که معروفترین آنها عبارتند از:
1- Adams
2- Carsim/Trucksim
نرم افزار MATLAB/Simulink نیز، در نسخههای اخیر خود، پیشرفت قابل توجهی در زمینه دینامیک خودرو داشته است ولی درجات آزادی مدلهای ارائه شده و پیچیدگی این مدلها، در نرمافزارهای نام برده شده که از لحاظ تخصصی به دینامیک خودرو پرداختهاند، مشهودتر است. همچنین، در نهایت، به مدلسازی دینامیکی خودرو تارا در پروژه K132 پرداخته خواهد شد که با استفاده از قویترین نرمافزار طراحی دینامیکی، یعنی نرمافزار Adams، صورت گرفته است.
پارامترهای طراحی
نرخ زاویه یاو (7)، زاویه کنارسرش (8) و سرعت خودرو، از پارامترهای بسیار مهم در زمینه فرمان پذیری خودرو به شمار میروند. ولی در شاخه راحتی سواری خودرو، شاخص راحتی (9) و انتقالپذیری (10) از جمله پارامترهای مهم در برای ارزیابی شاخصه راحتی هستند.
مدلسازی دینامیکی
مدلهای دینامیکی خودرو، با گذار مدل جرم متمرکز مرسوم، و رسیدن به مدل المان محدود (11)، تغییر مدل زیر-ساختاری (12) دینامیکی به مدل دینامیکی چند-جسمی (13)، و تبدیل مدل خطی به مدل غیر خطی با سختی (14) و میرایی (15) غیر خطی، رو به توسعه نهاده است. در ادامه به بررسی این مدلها پرداخته خواهد شد.
-
مدل جرم متمرکز
روش مدلسازی با جرم متمرکز، مدلی با درجه آزادی محدود سیستم خودرو است که شامل المانهایی مانند جرم، فنر و کمک فنر است. از مثالهایی که میتوان در این زمینه نام برد، میتوان مدل 2 درجه آزادی یک-چهارم (16) خودرو، مدل نیم-خودرو (17) با 4 تا 5 درجه آزادی و مدل خودرو کامل (18)، با 7 تا 18 درجه آزادی را نام برد.
برای بررسی پایداری فرمانپذیری خودرو، تعداد درجات آزادی می تواند دو، ده و یا بیشتر باشد. برای مثال میتوان از یک مدل 2 درجه آزادی که شامل زاویه یاو (19) و متغیر جانبی (20) میشود، استفاده نمود. و یا از یک مدل 3 درجه آزادی که شامل متغیر طولی، جانبی و زاویه یاو میشود، استفاده کرد و یا یک مدل 4 درجه آزادی با متغیر طولی، جانبی، زاویه یاو و رول (21) تشکیل داد. مدلهای نام برده شده جهت ارزیابی فرمانپذیری خودرو با بهرهگیری از فرضیات مدل 2 چرخ و مدل 4 چرخ ساخته میشود که با استفاده از نرمافزار MATLAB/Simulink قابل توسعه هستند.
هرچند، مدلهای جرم متمرکز، در واقع، ساختار سادهسازی شده واقعی خودرو است، ولی میتوانند مشخصههای ارتعاشات خودرو و اثرات پارامترهای مربوط به ساختار خودرو را با بهرهگیری از عملکرد خودرو ارائه دهند. مزایای استفاده از این مدلها، سادگی و امکان دستیابی به شرح تحلیلی و طراحی کنترل فعال (22) و نیمه-فعال (23) است.
-
مدل دینامیک چند-جسمی
مدل دینامیک چند-جسمی به سیستمی اطلاق میگردد که شامل اجسام یا اتصالات صلب است که با استفاده از مفاصل به یکدیگر متصل میشوند و حرکت نسبی آنها را محدود میکند. مطالعه سیستم دینامیک چند-جسمی، در واقع، به تجزیه و تحلیل چگونگی مکانیزم سیستمهایی اطلاق میگردد که تحت تأثیر نیروها حرکت میکنند که با نام دینامیک مستقیم (24) نیز شناخته میشود.
مدلسازی دقیق دینامیکی نیازمند مدل سازی انواع گوناگونی از اجزاء، مانند سیستمهای کنترل الکترونیکی، اجزاء و اتصالات متصل و همچنین پدیدههای فیزیکی مانند ارتعاشات، اصطکاک و نویز (25) میباشد. تحلیل حرکتی، به فرد این قابلیت را میدهد که با ارزیابی سریع و اصلاح طراحی، چالشهای عملکردی، ایمنی و راحتی یک سیستم را برطرف نماید.
مدلسازی دینامیکی خودرو تارا (K132)
مدل دینامیکی خودرو تارا که در نرمافزار Adams و MATLAB، در شرکت جتکو (26) توسعه یافته و با روشهای مختلف مدلسازی و مورد تجزیه و تحلیل قرار گرفته است. مدل دینامیکی تحلیلی خودرو تا که در نرم افزار MATLAB توسعه یافته است، در راستای اعتباردهی مدل Adams و تحقیق رفتار تقریبی این مدل، ایجاد گردیده است.
مدل دینامیکی خودرو تارا در نرم افزار Adams با دو حالت پارامتریک (مدل ساده) و انعطافپذیر، مدلسازی شده است. همان طور که در شکل 1 مشاهده میگردد؛ مدل انعطافپذیر خودرو تارا در نرم افزار Adams، با وارد نمودن اجزاء انعطافپذیر سیستمهای تعلیق جلو و عقب، با استفاده از نرمافزار FEM، توسعه یافته است. تمامی پارامترهای خودرو تارا در این مدل وارد شده و این مدل صحهگذاری گردیده است. همانطور که در شکل 2 مشاهده میگردد، صحهگذاری پاسخهای سیستم با در نظر گرفتن خطای 15 درصدی در پاسخها با استفاده از یک ابر خاکستری رنگ ارائه خواهند گردید.
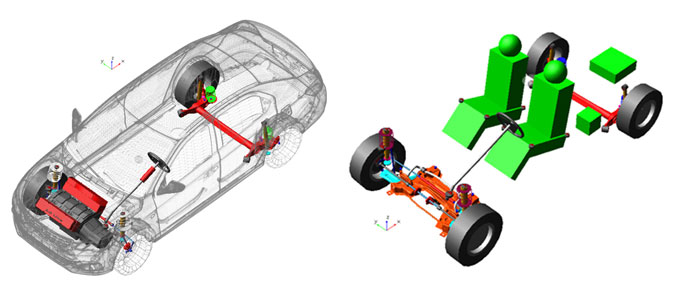
شکل 1 مدل دینامیکی خودرو تارا در نرمافزار Adams/Car
در ادامه، پاسخهای 3 مدل خودرو در نرم افزار Adams مشاهده میشود:
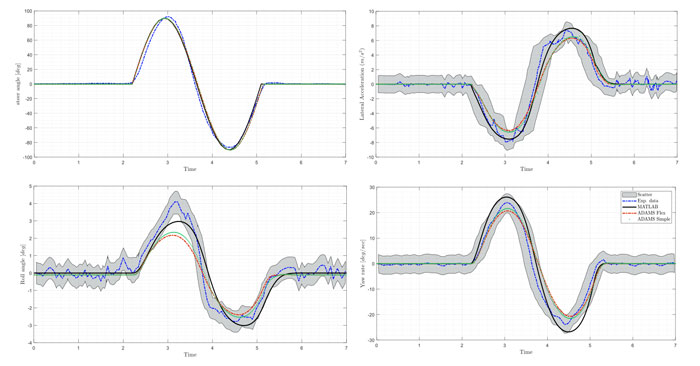
شکل 2، مقایسه پاسخ مدلهای توسعه یافته در نرم افزار Adams و MATLAB در آزمون Step-Steer
همان طور که در شکل 2 مشاهده میشود، پاسخهای مربوط به هر سه مدل با تقریب بسیار خوبی به یکدیگر نزدیک هستند و تفاوت بسیار اندکی نسبت به پاسخ خروجی آزمون تجربی دارند.
در راستای تحلیل عملکرد خودرو، زیر سیستمهای تعلیق جلو و عقب به صورت مجزا مدلسازی شدهاند که در شکل 3 مشاهده میگردد. این مدلسازی در راستای تحلیل رفتار دینامیکی و عملکردی اجزاء تعلیق جلو و عقب در حالت اعمال نیروهای استاتیکی انجام شده است.
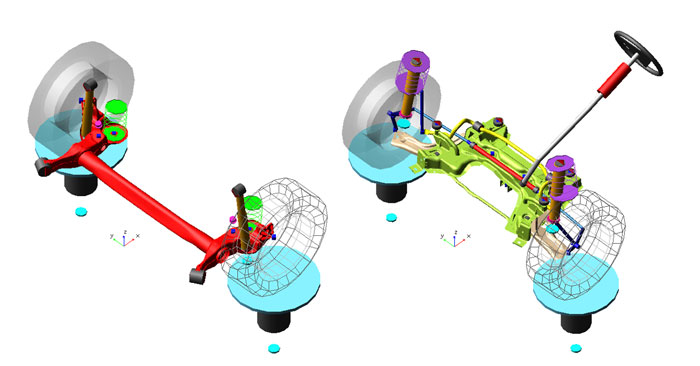
شکل 3 زیر سیستم تعلیق جلو و عقب خودرو تارا در نرمافزار Adams/Car
آینده مدلسازی دینامیکی
پیشرفت علم و فناوری، در زمینه دینامیک خودرو، باعث سرعت هرچه بیشتر توسعه مدلهای دینامیکی و دقت هرچه بیشتر این مدلها میگردد. غیرخطی نمودن مدلهای دینامیکی در زمینههای گوناگون موجب همسایگی و نزدیکی پاسخهای تئوری و تجربی و قابلیت اعتماد بیشتر به این مدلها میگردد. قابلیت اتکاء به مدلهای ریاضی و نرمافزاری، به علم مهندسی، قدرت پیشبینی واقعیت را ارائه مینماید و این قدرت پیشبینی، موجب ایمنی و راحتی هر چه بیشتر سرنشین در هر زمینهای میشود.
پیشروی خودروهای برقی در بازار خودروهای کنونی باعث جلب توجه هر چه بیشتر خودروسازان در این زمینه شده که این امر به خودی خود دقت هرچه بیشتر این نوع خودرو را در زمینههای مربوط به دینامیک و ایمنی خودرو در جاده میطلبد. زیرا که با پیشرفت علم در زمینه سیستمهای انتقال قدرت خودرو، سیستمهای دینامیکی خودرو نیز بایستی بیش از پیش مورد توجه قرار گیرد.
پانوشت
[1] Virtual Reality
[2] Sprung Mass
[3] Unsprung Mass
[4] Powertrain System
[5] Handling
[6] Ride Comfort
[7] Yaw
[8] Sideslip
[9] Ride Index
[10] Transmissibility
[11] FEM
[12] Dynamical Substructure
[13] Multi-Body
[14] Stiffness
[15] Damping
[16] Quarter-Vehicle Model
[17] Half-Vehicle Model
[18] Full-Vehicle Model
[19] Yaw
[20] Lateral
[21] Roll
[22] Active
[23] Semi-Active
[24] Forward Dynamics
[25] Noise
[26] جامع تحقیق و توسعه فناوریهای خودرو
منابع
Jian-bin, L., Xinlu, L., & Wei-qiang, Y. (2011). The Vehicle Dynamic Parameters Recognition of In-wheel Motor Driven Electric Vehicle. Procedia Engineering, 15, 443–447. https://doi.org/10.1016/j.proeng.2011.08.084
Multibody Dynamics. (n.d.). Www.mscsoftware.com. https://www.mscsoftware.com/application/multibody-dynamics#:~:text=A%20multibody%20dynamic%20(MBD)%20system
Yang, S., Lu, Y., & Li, S. (2013). An overview on vehicle dynamics. International Journal of Dynamics and Control, 1(4), 385–395. https://doi.org/10.1007/s40435-013-0032-y

دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.